Fit-NGP: Fitting Object Models to Neural Graphics Primitives
- Marwan Taher
- Ignacio Alzugaray
- Andrew J. Davison Dyson Robotics Lab Imperial College London
Abstract
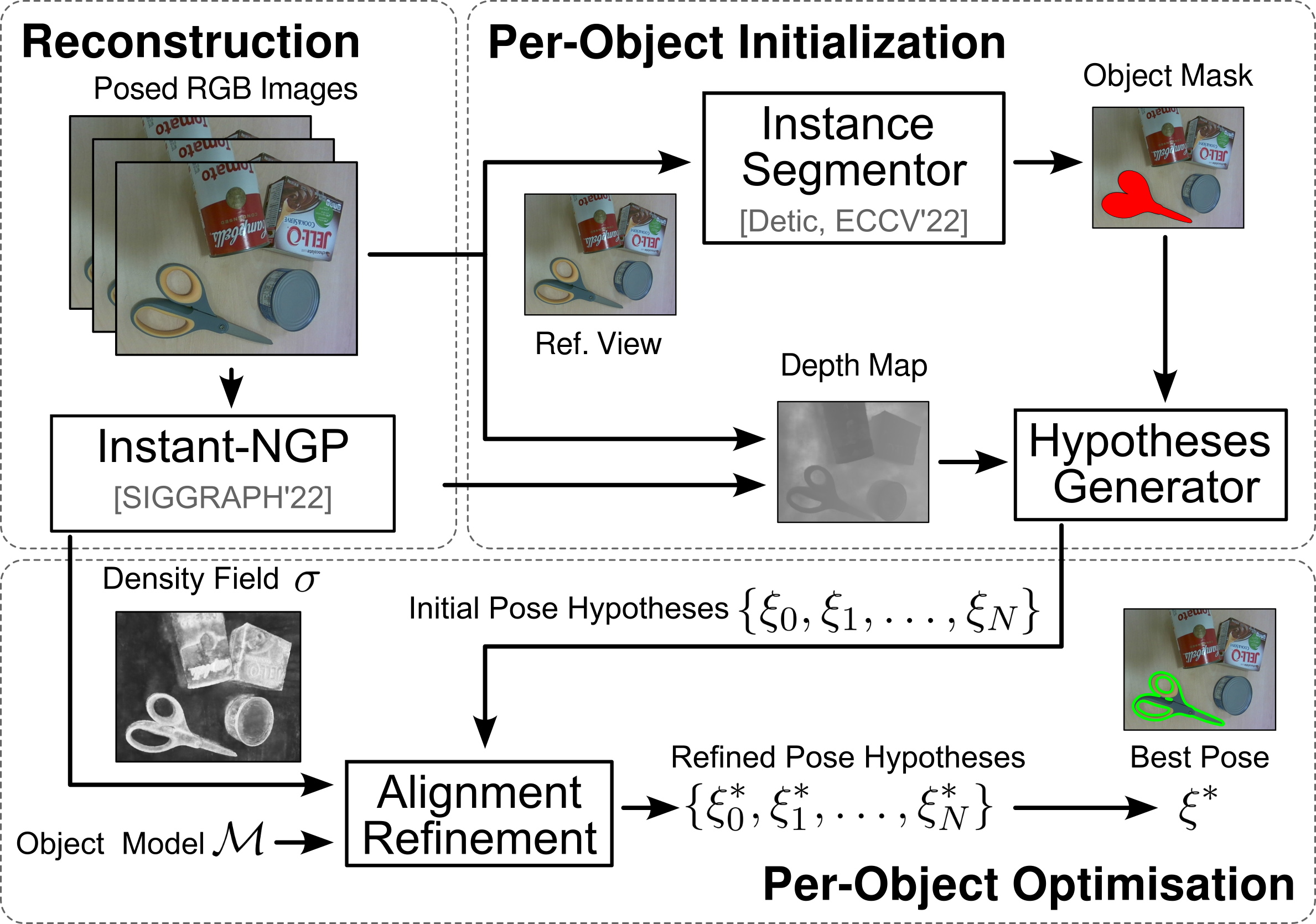
Accurate 3D object pose estimation is key to enabling many robotic applications that involve challenging object interactions. In this work, we show that the density field created by a state-of-the-art efficient radiance field reconstruction method is suitable for highly accurate and robust pose estimation for objects with known 3D models, even when they are very small and with challenging reflective surfaces. We present a fully automatic object pose estimation system based on a robot arm with a single wrist-mounted camera, which can scan a scene from scratch, detect and estimate the 6-Degrees of Freedom (DoF) poses of multiple objects within a couple of minutes of operation. Small objects such as bolts and nuts are estimated with accuracy on order of 1mm.
Pipeline
Video
Citation
Acknowledgements
Research presented here has been supported by Dyson Technology Ltd.
The website template was borrowed from Mip-NeRF.